熱線:021-56056830,66110819
手機:13564362870
熱線:021-56056830,66110819
手機:13564362870
在本節中,我們首先介紹在空氣呼吸燃料電池極化掃描期間同時獲得的I–V、溫度、PO2、RH和PH2O數據。然后,我們展示了在固定電流負載條件下,從陰極表面的垂直z和水平y橫向獲得的溫度、PO2和RH分布。最后,我們討論了由突然電流中斷周期引起的電壓、溫度、PO2和RH的瞬態響應。
電流-電壓極化。-圖6顯示了空氣呼吸燃料電池的I–V極化掃描,同時測量了位于燃料電池陰極表面(y=0 mm,z=1.6 mm)上方的mi)微型傳感器單元的溫度、PO2、RH和PH2O響應。測量期間的環境實驗室條件為:塔姆比安=21°C,環境=44%。隨著電流密度的增加,微傳感器在陰極表面附近記錄到顯著的熱加熱、氧氣消耗和水生成。盡管圖6中的大多數趨勢都是直觀的,但相對濕度響應值得討論。隨著電流密度的增加,相對濕度最初略有上升,然后在最高電流密度下略有下降。當結合溫度讀數并轉換為PH2O值時,這些相對濕度的趨勢最容易理解。如圖所示,PH2O隨電流的增加而線性增加。近表面相對濕度表示膜的歐姆性能,而PH2O值表示陰極的凈質量傳輸速率。在高電流密度下,PH2O增加(表明反應速率增加),但較高的溫度意味著相對濕度下降(飽和水蒸汽壓隨溫度呈指數增加),見上文等式3。后者導致膜阻力顯著增加,從而導致細胞電位下降。當電流密度高于350 mA/cm2時尤其如此,此時溫度對相對濕度的影響占主導地位,電池電位急劇下降。我們的吸氣式燃料電池模型捕捉到了PH2O和RH與電流密度之間的這些趨勢。19
根據電流密度和反應物消耗(或產物生成)之間的線性對應關系,預計PO2隨電流密度的增加而線性減少,而PH2O隨電流密度的增加而線性增加。假設傳感器探頭位于擴散層內,簡單的流量平衡產生以下線性關系:

這里j是電流密度,n是反應數,F是法拉第常數,Deff是有效擴散率,Δc是擴散層上濃度的變化,δ是特征擴散層厚度,k是陰極集電器未阻擋的活性面積分數。僅基于圖6難以提取關于陰極擴散層的進一步細節。然而,如下文所述,通過分析空間變化和瞬態響應,可以獲得該過程的進一步細節(包括Deff和δ的估計值)。
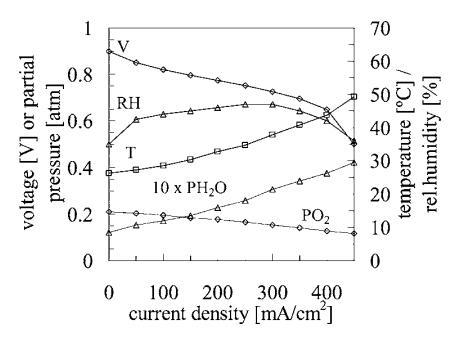
圖6.在標準極化掃描過程中,測量電壓、溫度、相對濕度、PO2和PH2O作為平面空氣呼吸燃料電池電流密度的函數。
輪廓(Z和Y)掃描。-圖7顯示了從燃料電池陰極表面的Y橫向(水平)測量中提取的測量溫度和PO2輪廓,Z=1.6 mm,Y=-1.52至1.52 mm,增量為254μm,工作電流密度為222和444 mA/cm2。圖8提供了從第二組y導線中提取的RH和PH2O剖面,從y=z=1.6 mm處?1.52至1.52 mm,增量為508μm,且操作點相同。由于通道肋的存在,PO2剖面表現出強烈的影響,而RH和PH2O剖面受肋的影響較小。溫度分布幾乎與肋的位置無關,這很可能是由于肋的高導熱性。通過這些測量,我們可以推斷出氧、水蒸氣和溫度擴散層的相對尺寸。我們假設,受肋骨位置強烈影響的標量場表示具有與肋骨特征尺寸相當或更小的特征長度的較小擴散層。
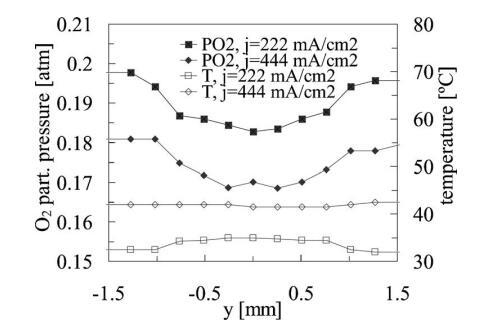
圖7.在距離y=1.6 mm的z=1.6 mm處,測量溫度和氧分壓PO2,作為傳感器組件位置的函數?對于222和444 mA/cm2的兩個電流密度負載,1.52至y=1.52 mm。
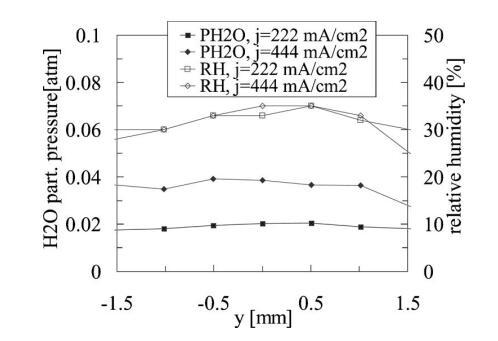
圖8.在距離y=1.6 mm的z=1.6 mm處,測量水蒸氣分壓(PH2O)和相對濕度(RH),作為傳感器組件位置的函數?對于222和444 mA/cm2的兩個電流密度負載,1.52 mm到y=1.52 mm。
正如預期的那樣,更高的電流密度操作點會導致更高的溫度、更大的氧氣消耗和更大的水輸出(如溫度曲線中的最大值、PO2曲線中的最小值以及j=444 mA/cm2時的PH2O曲線中的最大值所示)。同時,較高的電流密度操作點導致PO2、PH2O和溫度隨y的相對變化減小。這些趨勢與擴散層厚度隨電流密度的增加而增加是一致的。有趣的是,相對濕度隨電流密度的變化很小。較大的電流密度會增加局部產品的水蒸氣,但伴隨較大的溫度,因此相對濕度大致不變。
圖9提供了在相同的兩個工作電流密度下,從燃料電池陰極通道底部開始的z-橫向測量中提取的溫度和PO2分布圖。圖10提供了從第二組z-導線在相同操作點提取的RH和PH2O剖面,但從頂部陰極肋表面平面(z=1.5 mm)開始。溫度、PO2、RH和PH2O都顯示出對z位置的強烈依賴性。有趣的是,它們都表現出長程行為,梯度延伸到陰極表面以上幾毫米。我們通過距離δ95%(在z方向)量化擴散層的范圍,在該距離處,測量的固相或溫度的局部值和環境值之間的差值下降到z=0時初始值的5%。在222和444 mA/cm2條件下,擴散層厚度的估算值為:水蒸氣分壓為4.5和5.4 mm,氧分壓為4.3和6.1 mm,tem)溫度為7.4和9.4 mm。這些剖面圖表明,呼吸空氣燃料電池陰極處的質量傳輸擴散層可能比之前假設的空間范圍大得多。20,21我們強調,在這些實驗中,應特別注意盡可能保護燃料電池免受外部對流氣流的影響(為了表征自然對流對傳質的貢獻,降低傳感器噪音,提高再現性)。封閉房間中的氣流可以顯示比自然對流誘導氣流(9–11 cm/s9)更高的速度值因此,這些實驗條件可能代表受控靜態環境的“最壞情況”情景。因此,此處給出的y和z曲線可能對應于擴散層大小和影響的上限。在實際的空氣呼吸燃料電池環境中(例如,在辦公大樓中),外部對流可能會減少該擴散層的空間范圍。
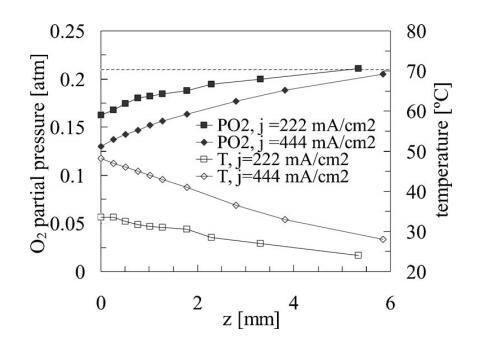
圖9.對于222和444 mA/cm2的兩個電流密度負載,在y=0 mm時,在z=0 mm到z=6 mm的范圍內測量氧分壓和溫度,作為傳感器組件位置的函數。虛線顯示了環境氧氣濃度。
燃料電池陰極表面/環境界面處的有效氧和水擴散系數(DO2 eff和DH eff 2O)可根據方程式4的通量平衡模型進行估算,如圖9和圖10中測量的空間O2和H2O分布。擬合這些空間剖面的初始斜率(從z=0到z=1mm),其中平面擴散近似最有可能成立,得到0.14–0.26 cm2/s的DO2 eff估計值和0.21–0.38 cm2/s的DH eff 2O估計值。這些估算值代表了有效擴散率,其中包含了對流效應(如有),這將增強質量傳輸。DO2 eff和DH eff 2O值與公布的298 K]T]330 K時空氣中氧的自由擴散系數DO2值(0.24–0.29 cm2/s)和空氣中水蒸氣的自由擴散系數DH2O值的順序相同,對于298 K]T]330 K.22,0.26–0.30 cm2/s的擴散率測量值與公布值之間的差異可能是由于自然對流、陰極通道中的非平面擴散以及濕度探頭有限體積導致的相對濕度測量不確定性的影響,實際布拉格光柵溫度和熱電偶讀數之間的差異等。作為上述簡單擴散分析的替代方法,我們在此給出傳質系數的估算值。為此,我們使用以下通量平衡方程描述對流傳質

此處“hm,i是spe)的平均對流傳質系數i(cm/s),ci,z=0是物種i在z=0時的濃度,ci,z=是物種i的環境濃度。在我們之前的模型19中獲得的氧和水蒸氣傳質系數和值的估計值匯總在表I中。
表I.在222和444 mA/cm2電流密度下,本研究中獲得的平均水蒸氣和氧氣對流傳質系數與通過組合傳質和傳熱模型(見參考文獻19)獲得的值之間的比較。
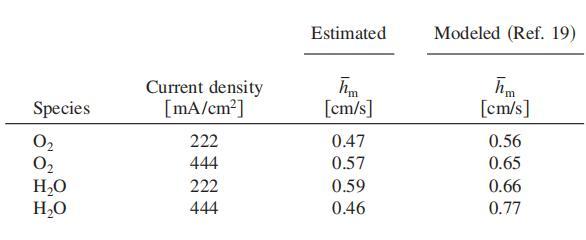
對于20°C和45%相對濕度的類似負載和環境條件,氧傳質的估算值與我們的近期建模結果一致。在444 mA/cm2的較高電流密度下估算的水蒸氣傳質系數與模型預測不同。我們將此歸因于水蒸氣濃度估計的測量不確定度,因為陰極表面的水蒸氣濃度是從陰極肋上方測量的溫度和相對濕度值推斷出來的。
與質量通量不同,陰極表面的熱流必須視為對流和輻射分量的總和,如以下熱流方程所示

這里hT是總傳熱系數,可以表示為對流傳熱系數hTc和輻射傳熱系數hTr之和。輻射傳熱系數定義為

式中, 是表面發射率, 是波爾茲曼常數,Tz=0是z=0時的溫度,Tz=是環境溫度。
表II將從圖9所示溫度剖面獲得的對流和輻射平均傳熱系數的估計值與從我們之前的建模中獲得的值進行了比較。19我們假設陰極表面為灰色,發射率為0.9,并且是等溫的。用于計算產生熱量的燃料電池電壓在222 mA/cm2的電流負載下為0.75 V,在444 mA/cm2的電流負載下為0.63 V。燃料電池陰極產生的熱量不僅取決于燃料電池的電壓和電流,還取決于凝結水的比例,并將凝結潛熱添加到熱流平衡中。根據我們之前的實驗研究9,我們假設大約30%的產品水在我們的實驗中冷凝。估算值與我們的模型預測值吻合良好,相差約10%。
表二。在222和444 mA/cm2的兩種電流密度負載下,估算和模擬(見參考文獻19)平均傳熱系數的比較。對于所有估計,我們假設陰極表面為等溫灰色,表面發射率為0.9。我們還假設約30%的生成水已凝結(見參考文獻9)。
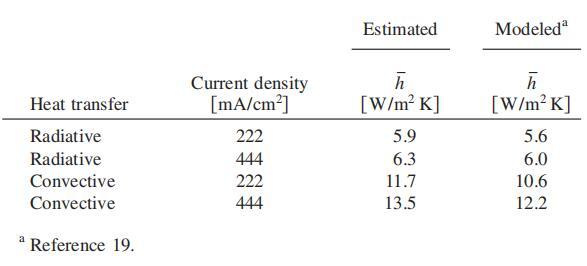
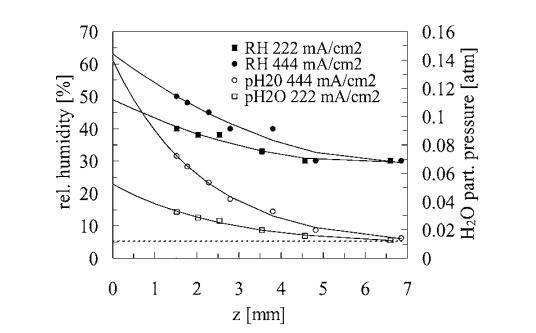
圖10. 對于222和444 mA/cm2的兩個電流密度負載,在z=1.5 mm到z=7 mm之間的z移動期間,測量相對濕度和部分水蒸汽壓,作為傳感器組件的函數。記錄的相對濕度和溫度(未顯示)讀數(填充標記)用二階多項式擬合近似(實線并外推至z=0。根據實際測量值確定的水蒸氣濃度顯示為空標記,而實線顯示的水蒸氣濃度是通過使用二階多項式近似溫度和相對濕度獲得的。虛線顯示的是環境水蒸氣濃度在實驗過程中(21°C和45%相對濕度)的溫度變化。
瞬態測量。-圖11a顯示了在0和333 mA/cm2之間的電流中斷脈沖周期內記錄的電壓、溫度和PO2瞬態。在圖11a的比例下,約375 s時發生的電壓瞬態很難解析,因此圖11b中提供了放大版本。圖11b中的氧瞬態。11b可適用于時間常數為τO2-6 s的單指數模型。此短的單時間常數可能與邊界層中的O2擴散有關。相反,溫度瞬態需要同時適用于指數項和線性項。指數項(τT-20 s)可能與燃料電池體的熱質量以及熱邊界層的形成有關。線性項(-0.19°C/min)是由于陰極表面的持續浸沒導致氣體擴散層中的傳質損失,從而導致電池電位降低,并增加熱量產生。如果液態水從陰極表面持續去除,則線性項為ab)。23
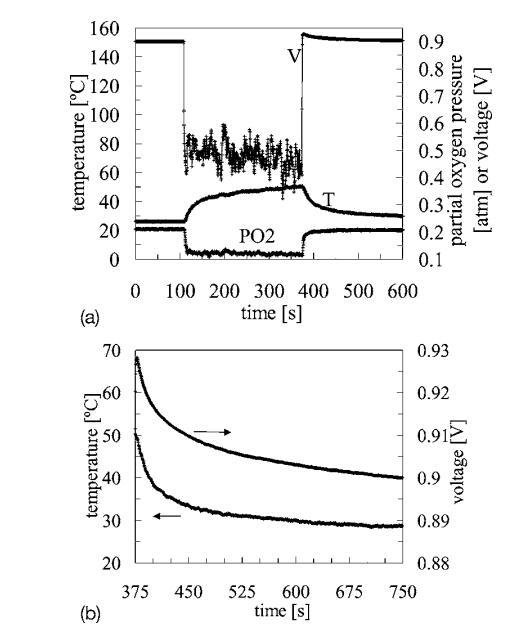
圖11.(a)在0和333 mA/cm2之間的階躍電流脈沖期間,溫度、燃料電池電壓和氧分壓隨時間變化的測量,傳感器組件位于z=0 mm和y=0 mm處。(b)t=375 s電流轉換后的溫度和電壓瞬態詳情。
鑒于測得的氧濃度隨時間變化的恢復率,可使用瞬態擴散標度參數估計燃料電池陰極擴散層內的有效氧擴散率。對于一階,擴散瞬態遵循眾所周知的標度關系

其中,x是與橫向擴散過程相關的特征長度標度,Deff是有效擴散率,t是時間。使用從z剖面分析(x=δO2=0.6 cm)獲得的擴散層估計值,我們可以從公式8中提取有效氧擴散率的粗略估計值。該分析產生DO2 eff~0.06 cm2/s。該估算值類似,但略小于從先前通量平衡分析中獲得的值-應用于圖9中空間O2分布的等式4]。我們得出結論,由于固有傳感器響應限制,瞬態技術可能略微低估了真實的氧氣擴散率(見測量程序一節)。測得的O2瞬態弛豫時間(tO2-6 s)與固有O2傳感器速度(tO2傳感器-1.3 s)相當,導致O2瞬態信號“儀器展寬”。使用較小毛細管直徑的O2微傳感器可以提高傳感器速度,但會增加噪聲并降低傳感器穩定性。
圖12顯示了在相同電流負載循環條件下(0和333 mA/cm2之間)測得的RH和PH2O瞬態。當RH信號顯示非常小的瞬態響應時,PH2O響應在恒流負載下顯示較大的變化。PH2O瞬態的初始部分可近似為指數,產生時間常數τH2O-14 s。該時間常數基本上反映了濕度傳感器的上升時間,因此無法準確測量初始PH2O變化的時間尺度,但我們可以將其值限制在約14 s以內。隨后隨時間變化的PH2O增加速度要慢得多,本質上是非指數性的。該響應表明如前所述,液態水在陰極表面積聚。當電流在t-1500秒中斷時,PH2O很快恢復到環境條件,松弛時間約為14秒。(然而,這一次,請注意,PH2O信號不包含二次線性分量。)另一方面,相對濕度響應顯示出有趣的超調行為。這種超調很可能與濕度傳感器固有響應時間的限制有關(請參閱濕度傳感器校準部分)。為了完整起見,我們注意到,這種超調也可能是由產水立即中斷和電池溫度緩慢下降之間的時間延遲造成的。由于這種滯后,陰極上方仍然溫暖的空氣將經歷相對濕度的突然下降,這可能會隨著電池(和周圍空氣)冷卻而重新覆蓋。
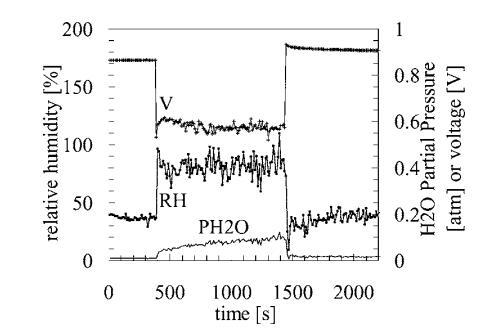
圖12.(a) 在0和333 mA/cm2之間的階躍電流脈沖期間,測量相對濕度、燃料電池電壓和水蒸氣分壓隨時間的變化,傳感器組件位于z=1.6 mm和y=0 mm處。
 相關新聞
相關新聞